Взаимодействие тел примеры из жизни. Взаимодействие тел. Определение и виды. Расчет пути и времени движения
Читайте также
Толкните стену. Прямо сейчас подойдите и сильно толкните стену. Что-нибудь произошло? Вряд ли. Тогда толкните стену не просто сильно, а изо всех сил. На этот раз произошло? Со стеной - вряд ли, а вот вы, скорее всего, отлетели от стены на некоторое расстояние. Как же так?
Ведь это вы толкали стену, а получилось, что это стена толкнула вас. Еще пример - бильярд. Когда мы бьем кием по шару и попадаем в другой шар, то второй шар начинает движение, но и первый при этом отлетает в обратную сторону или же вбок. Третий пример - это молоток. Когда молотком бьют по гвоздю, то не только гвоздь забивается в стену, но и молоток отскакивает обратно и может дать по лбу незадачливому умельцу. Во всех этих примерах мы действовали одним телом на другое, но при этом оказалось, что и другое тело тоже действовало на первое. В физике действие двух тел друг на друга называется взаимодействием.
Взаимодействие тел в физике
При взаимодействии двух тел всегда результат ощущают на себе оба тела. То есть, говоря простым языком, всегда при воздействии на что-то следует отдача. Наверное, все драчливые мальчишки знают, что во время драки страдает не только лицо противника, но и собственные кулаки можно здорово поразбивать. То есть, пока один хулиган атакует кулаком нос другого хулигана, нос в это время атакует кулак в ответ. Однако, нос при этом страдает гораздо больше. Ну, с носом все понятно - он мягче и потому сильнее повреждается, а вот почему шар при ударе кием отлетает намного сильнее, чей кий в это же время? То есть, не отлетает же кий, и мы вместе с ним, на несколько метров от стола? А это объясняется тем, что тела бывают более инертны и менее инертны.
Виды взаимодействия тел и мера взаимодействия
Про тело, которое при взаимодействии изменяет свою скорость медленнее, говорят, что оно более инертно и имеет большую массу. А тело, которое быстрее изменяет свою скорость, мы называем менее инертным, и говорим, что оно имеет меньшую массу. Именно поэтому мы не отлетаем от стола при ударе кием по шару и, наоборот, отлетаем от стены, при попытке толкнуть стену и, соответственно весь дом, к которому она приделана. Масса нас с кием намного больше массы бильярдного шара, но при этом намного меньше массы дома, даже если мы взгромоздим себе на плечи жену, трех детей, связку баранок и кошку.
Знакомство с взаимодействием тел рассматривается в курсе физики 7 класса.
Мерой взаимодействия тел является сила. Существует 4 не сводящихся друг к другу вида взаимодействий: гравитационное, электромагнитное, сильное и слабое. Но эту тему подробно разбирают в курсе 10 класса.
Для того чтобы тело покоилось или двигалось равномерно и прямолинейно, на него либо вообще не нужно действовать, либо действовать так, чтобы суммарное действие всех тел было скомпенсировано. Настало время разобраться, что должно происходить для того, чтобы тело начало изменять скорость, то есть приобрело ускорение. Для этого понадобится вспомнить некоторые физические величины, с которыми мы сталкивались на уроках физики в предыдущих классах.
Как известно, скорость тела меняется только, если на него действует другое тело. Например, свободное падение грузика в результате действия Земли на него. При падении скорость увеличивается, а значит, её изменение обусловлено этим действием (рис. 1).
Рис. 1. Свободное падение
Но при этом меняется скорость и второго тела. Попробуйте оттолкнуться на льду от товарища, стоящего рядом. Вы заметите, что ваш товарищ тоже начнет двигаться. Тела взаимодействуют. Одностороннего действия не бывает.
Для характеристики взаимодействия тел необходимо ввести физическую величину, такой величиной является сила.
Сила - это векторная величина, которая характеризует действие одних тел на другие (взаимодействие тел). Сила - это мера взаимодействия. Единицей измерения силы в системе СИ является ньютон.
Н (ньютон)
Так как у тела появляется ускорение в результате действия силы, то необходимо установить связь между ускорением, которое приобрело тело, и силой, вызвавшей это ускорение.
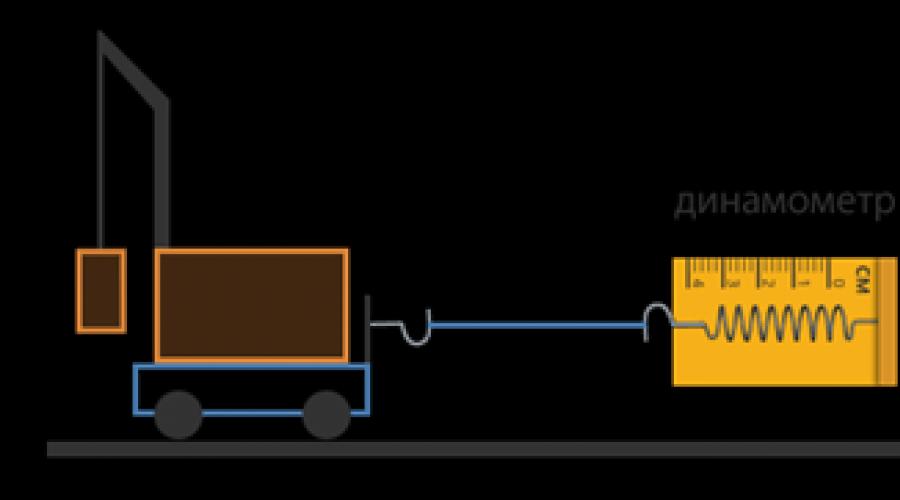
Если к тележке, на которой установлена специальная конструкция с подвешенным грузиком (рис. 2), отклоняющемся при ускоренном движении тележки, прикладывать силы различной величины, то можно заметить, что отклонение грузика увеличится при увеличении приложенной силы. То есть ускорение, которое тело приобретает в результате действия на него силы, прямо пропорционально величине этой силы (рис. 3). Ускорение направлено туда же, куда и сила .

Рис. 2. Изучение зависимости между силой и ускорением тела

Рис. 3. Ускорение, которое тело приобретает в результате действия на него силы, прямо пропорционально величине этой силы
Ускорение также зависит от массы тела.
Если менять массу тележки (рис. 4), к которой прикладывается сила постоянной величины, то можно заметить, что отклонение грузика уменьшается при увеличении массы. То есть ускорение обратно пропорционально массе тела.

Рис. 4. Ускорение, которое тело приобретает в результате действия на него силы, обратно пропорционально массе этого тела
Второй закон Ньютона объединяет два вывода, полученных выше.
Второй закон Ньютона : ускорение, приобретаемое телом в результате действия на него силы F , прямо пропорционально величине этой силы и обратно пропорционально массе тела.
Если на тело действуют несколько сил, то находят равнодействующую этих сил, то есть некую общую суммарную силу, обладающую определенным направлением и числовым значением. То есть фактически все случаи приложения различных сил в конкретный момент времени можно свести к действию одной равнодействующей силы.
Равнодействующей называют такую силу, которая сообщала бы телу такое же ускорение, как и векторная сумма всех сил, действующих на тело.
Таким образом, второй закон Ньютона можно сформулировать так: равнодействующая всех сил, действующих на тело, равна произведению массы тела на приобретаемое в результате действия этих сил ускорение.
Виды взаимодействия в физике
В природе существуют четыре вида взаимодействия.
1. Гравитационное (сила тяготения) - это взаимодействие между телами, которые обладают массой. Существенным оно является в масштабах космических тел. Например, мы ощущаем свое притяжение к Земле, так как она обладает огромной массой, но не ощущаем притяжение к столу, к стулу и другим телам со сравнительно небольшой массой.
2. Электромагнитное . В состав любого атома входят заряженные частицы, следовательно, такое взаимодействие - фундаментальное и мы с ним встречаемся всегда и везде. Именно электромагнитное взаимодействие ответственно за такие механические силы, как сила трения (рис. 5) и сила упругости.

Рис. 5. Природа силы трения
При увеличении межмолекулярного расстояния силы межмолекулярного притяжения и отталкивания уменьшаются - только силы притяжения уменьшаются медленнее, чем силы отталкивания - поэтому возникают суммарные силы упругости , которые направлены в сторону межмолекулярных сил притяжения (рис. 6).

Рис. 6. Природа силы упругости
По сравнению с гравитационным электромагнитное взаимодействие значительно сильнее, но, в отличие от первого, справедливо для тел, обладающих электрическим зарядом.
3. Сильное . Данное взаимодействие было открыто около 100 лет назад. Именно тогда ученые задумались, каким образом протоны, которые заряжены положительно и входят в состав ядра, удерживаются там (рис. 7), ведь одноименно заряженные тела должны отталкиваться. Сильное взаимодействие удерживает протоны в ядре. Это взаимодействие короткодействующее, то есть действует на расстоянии порядка размера ядра.

Рис. 7. Сильное взаимодействие удерживает протоны в ядре
4. Слабое . Такое взаимодействие ответственно за некоторые виды взаимодействия среди элементарных частиц, за некоторые виды β-распада и за другие процессы, происходящие внутри атома, атомного ядра (рис. 8).

Рис. 8. Альфа-, бета- и гамма-распады
Многие физики полагают, что в природе существует одно общее взаимодействие, а вышеперечисленные взаимодействия - это лишь его проявления, и пытаются получить так называемую единую теорию поля, в которой все эти четыре вида будут сводиться к одному. На данный момент удалось объединить электромагнитное, сильное и слабое взаимодействие.
Второй закон Ньютона в НСО. Центробежная сила
Законы Ньютона выполняются в инерциальных системах отсчета, но можно добиться того, что эти законы будут выполняться и в неинерциальных системах отсчета (НСО).
Ученые договорились считать, что в НСО, помимо привычных нам сил, ответственных за появление у тела ускорения, существуют силы инерции - особый вид сил. Они связаны с ускорением, с которым неинерциальная система движется по отношению к инерциальной.
В НСО второй закон Ньютона приобретает следующий вид:
![]() ,
,
где - ускорение в неинерциальной системе отсчета; - сила инерции
где - абсолютное ускорение инерциальной системы отсчета
В НСО третий закон Ньютона в отношении сил инерции не выполняется.
Примером силы инерции является центробежная сила . Во время резкого поворота автомобиля человека вдавливает в кресло. С точки зрения этого человека на него действует центробежная сила, а с точки зрения наблюдателя на земле человек продолжает двигаться по инерции, в то время как кресло автомобиля стремится повернуть (рис. 9).

Рис. 9. Центробежная сила
Как искать равнодействующую силу
Равнодействующая (результирующая) - это сила, результат действия которой эквивалентен суммарному действию всех сил, приложенных к телу (рис. 10).

Рис. 10. Нахождение равнодействующей
Силы не обязательно должны взаимно увеличивать друг друга. Представьте, что вы зимой катаетесь на санках (рис. 11). В первой ситуации силы, которые придают ваши друзья, складываются. Во второй один из друзей не хочет отдавать санки и тянет их в другую сторону. В этом случае модули сил вычитаются.

Рис. 11. Иллюстрация к примеру
Рассмотрим пример, когда силы направлены не вдоль одной прямой, а в разные стороны. На рис. 11 изображено тело, которое находится на наклонной плоскости и удерживается на ней за счет действия силы трения . Кроме этой силы, на тело действует сила тяжести () и сила реакции опоры (). Если тело находится в положении равновесия, то векторная сумма всех сил равна нулю, то есть равна нулю равнодействующая.
![]()
Следовательно, ускорение, которое приобретает тело, также равно нулю.

Рис. 11. Силы, действующие на тело
Список литературы
- Г.Я. Мякишев, Б.Б. Буховцев, Н.Н. Сотский. Физика 10. - М.: Просвещение, 2008.
- А.П. Рымкевич. Физика. Задачник 10-11. - М.: Дрофа, 2006.
- О.Я. Савченко. Задачи по физике. - М.: Наука, 1988.
- А.В. Перышкин, В.В. Крауклис. Курс физики. Т. 1. - М.: Гос. уч.-пед. изд. мин. просвещения РСФСР, 1957.
- Интернет-портал Studopedia.org ().
- Интернет-портал Abitura.com ().
- Интернет-портал School-collection.edu.ru ().
- Интернет-портал Class-fizika.narod.ru ().
- Интернет-портал Fizika-lekcii.ucoz.ua ().
Домашнее задание
Взаимодействие тел.
При отсутствии взаимодействия тела движутся равномерно в инерциальных системах отсчета. Только действие одного тела на другое приводит к изменению скорости его движения, к появлению ускорения. Следовательно, ускорение тела служит показателем того, что тело подверглось воздействию со стороны других тел. Однако само ускорение не может служить мерой взаимодействия тел, так как оно зависит не только от характеристик взаимодействия, но и от свойств самого тела. Поэтому нам необходимо определить, от каких характеристик тела и от каких характеристик взаимодействия зависит величина ускорения.
При сближении тел (или систем тел) характер их поведения меняется. Поскольку эти изменения носят взаимный характер, говорят, что тела взаимодействуют друг с другом. При разведении тел на очень большие расстояния (на бесконечность) все известные на сегодняшний день взаимодействия исчезают.
Внешние и внутренние силы
Силы являются мерилом механического взаимодействия тел. Если конструкция рассматривается изолированно от окружающих тел, то действие последних на нее заменяется силами, которые называются внешними. Внешние силы, действующие на тело, можно разделить на активные (независимые) иреактивные. Реактивные усилия возникают в связях, наложенных на тело, и определяются действующими на тело активными усилиями.
По способу приложения внешние силы делятся на объемные и поверхностные.
Объемные силы распределены по всему объему рассматриваемого тела и приложены к каждой его частице. В частности, к объемным силам относятся собственный вес сооружения, магнитное притяжение или силы инерции. Единицей измерения объемных сил является сила, отнесенная к единице объема кН/м 3 .
Поверхностные силы приложены к участкам поверхности и являются результатом непосредственного контактного взаимодействия рассматриваемого объекта с окружающими телами. В зависимости от соотношения площади приложения нагрузки и общей площади поверхности рассматриваемого тела, поверхностные нагрузки подразделяются насосредоточенные и распределенные. К первым относятся нагрузки, реальная площадь приложения которых несоизмеримо меньше полной площади поверхности тела (например, воздействие колонн на фундаментную плиту достаточно больших размеров можно рассматривать как действие на нее сосредоточенных усилий). Если же площадь приложения нагрузки сопоставима с площадью поверхности тела, то такая нагрузка рассматривается как распределенная. Сосредоточенные усилия измеряются в кН, а распределенные кН/м 2 .
Взаимодействие между частями рассматриваемого тела характеризуется внутренними силами, которые возникают внутри тела под действием внешних нагрузок и определяются силами межмолекулярного воздействия.
Внешние силы, действующие на конструкцию, разделяют на активные силы (нагрузку) и реакции опор. По характеру действия различают сосредоточенные силы, измеряемые в ньютонах (Н, кН), распределенную нагрузку, измеряемую в ньютонах на метры (Н/м, кН/м), если нагрузка распределена вдоль линии, или в ньютонах на метр квадратный (Н/м 2 , кН/м 2), если нагрузка распределена по поверхности, сосредоточенный момент, измеряемый в ньютонометрах (Нм, кНм) (рис. 1.2). Реакции опор вычисляют через активные силы методами теоретической механики.
Под действием внешних сил стержень деформируется, при этом между отдельными частями стержня появляются дополнительные силы взаимодействия, называемые внутренними силами. Если стержень мысленно рассечь плоскостью, перпендикулярной к продольной оси стержня Z, то по всей площади поперечного сечения от одной части стержня на другую часть будут передаваться внутренние силы.Отбросим правую часть стержня. Внутренние силы, передающиеся от неё на левую часть (рис. 1.3), по отношению к левой части стержня становятся внешними силами и могут быть представлены главным вектором и главным моментом. Центром приведения принимается центр тяжести поперечного сечения стержня, через который проводят координатные оси X,Y, лежащие в плоскости сечения, и ось Z, перпендикулярную плоскости поперечного сечения. Главный вектор раскладывается на силы N, Q x , Q y , а главный момент – на моменты M x , M y , M z . Указанные шесть величин называют внутренними усилиями (внутренними силовыми факторами) стержня. Каждое из них имеет своё название: N – продольная (нормальная) сила, Q x и Q y – поперечные (перерезывающие) силы, М х и М y – изгибающие моменты, М z – крутящий момент.
Закон сохранения импульса.
При взаимодействии тел импульс одного тела может частично или полностью передаваться другому телу. Если на систему тел не действуют внешние силы со стороны других тел, то такая система называется замкнутой.
В замкнутой системе векторная сумма импульсов всех тел, входящих в систему, остается постоянной при любых взаимодействиях тел этой системы между собой.
Этот фундаментальный закон природы называется законом сохранения импульса. Он является следствием из второго и третьего законов Ньютона.
Рассмотрим какие-либо два взаимодействующих тела, входящих в состав замкнутой системы. Силы взаимодействия между этими телами обозначим через и По третьему закону Ньютона Если эти тела взаимодействуют в течение времени t, то импульсы сил взаимодействия одинаковы по модулю и направлены в противоположные стороны: Применим к этим телам второй закон Ньютона:
Это равенство означает, что в результате взаимодействия двух тел их суммарный импульс не изменился. Рассматривая теперь всевозможные парные взаимодействия тел, входящих в замкнутую систему, можно сделать вывод, что внутренние силы замкнутой системы не могут изменить ее суммарный импульс, т. е. векторную сумму импульсов всех тел, входящих в эту систему.
Закон сохранения импульса во многих случаях позволяет находить скорости взаимодействующих тел даже тогда, когда значения действующих сил неизвестны. Примером может служить реактивное движение. Зако́н сохране́ния и́мпульса (Зако́н сохране́ния количества движения) утверждает, что сумма импульсов всех тел (или частиц) замкнутой системы есть величина постоянная.
В классической механике закон сохранения импульса обычно выводится как следствие законов Ньютона. Из законов Ньютона можно показать, что при движении в пустом пространстве импульс сохраняется во времени, а при наличии взаимодействия скорость его изменения определяется суммой приложенных сил.
Как и любой из фундаментальных законов сохранения, закон сохранения импульса описывает одну изфундаментальных симметрий, - однородность пространства.
Центр инерции. Теорема о движении центра инерции. Примеры.
Центр инерции
Импульс замкнутой механической системы имеет различные значения по отношению к различным инерциальным системам отсчета. Если система отсчета K"движется относительно системы K со скоростью V, то скорости частиц v" α и v α в этих системах связаны соотношением v α = v" α + V . Поэтому связь между значениями P и P" импульса в этих системах дается формулой:
![]() (1.69)
(1.69)
![]() (1.70)
(1.70)
Всегда можно подобрать такую систему отсчета K", в которой полный импульс обращается в нуль. Положив P" =0, находим, что скорость этой системы отсчета
 . (1.71)
. (1.71)
Если полный импульс механической системы равен нулю, то говорят, что она покоится относительно соответствующей системы координат. Скорость V имеет смысл скорости движения механической системы как целого с отличным от нуля импульсом. Связь между импульсом P и скоростью V системы как целого такая же, какая была бы между импульсом и скоростью одной материальной точки с массой, равной сумме масс в системе, .
Правая сторона формулы (1.71) может быть представлена как полная производная по времени от выражения:
![]() (1.72)
(1.72)
Можно сказать, что скорость V системы как целого есть скорость перемещения в пространстве точки, радиус-вектор которой дается формулой (1.72). Такая точка является центром инерции системы.
Закон сохранения импульса замкнутой системы можно сформулировать как утверждение о том, что ее центр инерции движется прямолинейно и равномерно. Это есть обобщение закона инерции для свободной материальной точки.
Энергию покоящейся как целое механической системы обычно называют ее внутренней энергией E вн. Она состоит из кинетической энергии движения частиц относительно друг друга и потенциальной энергии их взаимодействия. Полная же энергия системы, движущейся как целое со скоростью V,
 (1.73
(1.73
ЦЕНТР ИНЕРЦИИ
(центр масс) - геом. точка, положение к-рой характеризует распределение масс в теле или механич. системе. Координаты Ц. и. определяются ф-лами
или для тела при непрерывном распределении масс

где m k - массы материальных точек, образующих систему; x k , y k , z k - координаты этих точек; М =Sm k - масса системы; r(х, у, z) - плотность; V- объём. Понятие Ц. и. отличается от понятия центра тяжести тем, что последнее имеет смысл только для твёрдого тела, находящегося в однородном поле тяжести; понятие же Ц. и. не связано ни с каким силовым полем и имеет смысл для любой механич. системы. Для твёрдого тела положения Ц. и. и центра тяжести совпадают.
При движении механич. системы её Ц. и. движется так, как двигалась бы материальная точка, имеющая массу, равную массе системы, и находящаяся под действием всех внеш. сил, приложенных к системе. Кроме того, нек-рыеур-ния движения механич. системы (тела) по отношению к осям, имеющим начало в Ц. и. и движущимся вместе с Ц. и. поступательно, сохраняют тот же вид, что и для движения по отношению к инерциальной системе отсчёта. Ввиду этих свойств понятие о Ц. и. играет важную роль в динамике системы и твёрдого тела. С. М. Торг.
Взаимодействие тел. Опыт показывает, что при сближении тел (или систем тел) характер их поведения меняется. Поскольку эти изменения носят взаимный характер, говорят, что тела взаимодействуют друг с другом . При разведении тел на очень большие расстояния (на бесконечность) все известные на сегодняшний день взаимодействия исчезают.
Галлилей первым
дал правильный ответ на вопрос, какое
движение характерно для свободных
(т.е. не
взаимодействующих тел). Вопреки
существующему тогда мнению, что свободные
тела “стремятся” к состоянию покоя
(),
он утверждал, что при отсутствии
взаимодействия тела находятся в состоянии
равномерного движения ( ),
включающего покой как частный случай.
),
включающего покой как частный случай.
Инерциальные системы отсчета. В рамках формального математического подхода, реализуемого в кинематике, утверждение Галилея выглядит бессмысленным, поскольку равномерное в одной системе отсчета движение может оказаться ускоренным в другой, которая “ничем не хуже” исходной. Наличие взаимодействия позволяет выделить особый класс систем отсчета, в которых свободные тела движутся без ускорения (в этих системах большинство законов природы имеют наиболее простую форму). Такие системы называются инерциальными.
Все инерциальные системы эквивалентны друг другу, в любой из них законы механики проявляются одинаково. Это свойство было также отмечено Галилеем в сформулированном им принципе относительности: никаким механическим опытом в замкнутой (т.е. не сообщающейся с внешним миром) системе отсчета невозможно установить покоится ли она или равномерно движется. Любая система отсчета, равномерно движущаяся относительно инерциальной тоже является инерциальной.
Между инерциальными и неинерциальными системами отсчета существует принципиальное отличие: находящийся в замкнутой системе наблюдатель способен установить факт движения с ускорением последних, “не выглядывая наружу”(напр. при разгоне самолета пассажиры ощущают, что их “вдавливает” в кресла). В дальнейшем будет показано, что в неинерциальных системах геометрия пространства перестает быть евклидовой.
Законы Ньютона как основа классической механики. Сформулированные И.Ньютоном три закона движения в принципе позволяют решить основную задачу механики , т.е. по известным начальному положению и скорости тела определить его положение и скорость в произвольный момент времени.
Первый закон Ньютона постулирует существование инерциальных систем отсчета.
Второй закон Ньютона утверждает, что в инерциальных системах ускорение тела пропорционально приложенной силе , физической величине, являющейся количественной мерой взаимодействия. Величину силы, характеризующей взаимодействие тел, можно определить, например, по деформации упругого тела, дополнительно введенного в систему так, что взаимодействие с ним полностью компенсирует исходное. Коэффициент пропорциональности между силой и ускорением называют массой тела :
(1) F= ma
Под действием одинаковых сил тела с большей массой приобретают меньшие ускорения. Массивные тела при взаимодействии в меньшей степени меняют свои скорости, “стремясь сохранить естественное движение по инерции”. Иногда говорят, что масса является мерой инертности тел (рис. 4_1).
К классическим свойствам массы следует отнести 1) ее положительность (тела приобретают ускорения в направлении приложенных сил), 2) аддитивность (масса тела равна сумме масс его частей), 3) независимость массы от характера движения (напр. от скорости).
Третий закон утверждает, что взаимодействия оба объекта испытывают действия сил, причем эти силы равны по величине и противоположно направлены.
Типы фундаментальных взаимодействий. Попытки классификации взаимодействий привели к идее выделения минимального набора фундаментальных взаимодействий , при помощи которых можно объяснить все наблюдаемые явления. По мере развития естествознания этот набор менялся. В ходе экспериментальных исследований периодически обнаруживались новые явления природы, не укладывающиеся в принятый фундаментальный набор, что приводило к его расширению (например, открытие структуры ядра потребовало введения ядерных сил). Теоретические же осмысление, вцелом стремящееся к единому, максимально экономному описанию наблюдаемого многообразия, неоднократно приволило к “великим объединениям” внешне совершенно несхожих явлений природы (ньютон понял,что падение яблока и движение планет вокруг Солнца являются результатами проявления гравитационных взаимодействий, Эйнштейн установил единую природу электрических и магнитных взаимодействий, Бутлеров опроверг утверждения о различной природе органических и неорганических веществ).
В настоящее время принят набор из четырех типов фундаментальных взаимодействий :гравитационные, электромагнитные, сильное и слабые ядерные . Все остальные, известные на сегодняшний день, могут быть сведены к суперпозиции перечисленных.
Гравитационные взаимодействия обусловлены наличием у тел массы и являются самыми слабыми из фундаментального набора. Они доминируют на расстояниях космических масштабов (в мега-мире).
Электромагнитные взаимодействия обусловлены специфическим свойством ряда элементарных частиц, называемым электрическим зарядом. Играют доминирующую роль в макро мире и микромире вплоть на расстояниях, превосходящих характерные размеры атомных ядер.
Ядерные взаимодействия играют доминирующую роль в ядерных процессах и проявляются лишь на расстояниях, сравнимых с размером ядра, где классическое описание заведомо неприменимо.
В настоящее время стали весьма популярны рассуждения о биополе , при помощи которого “объясняется” ряд не очень надежно установленных на эксперименте явлений природы, связанных с биологическими объектами. Серьезное отношение к понятию биополя зависит от того, какой конкретный смысл. Вкладывается в этот термин. Если понятие биополя используется для описания взаимодействий с участием биологических объектов, сводящихся к четырем фундаментальным, такой подход не вызывает принципиальных возражений, хотя введение нового понятия для описания “старых” явлений противоречит общепринятой в естествознании тенденции к минимизации теоретического описания. Если же под биополем понимается новый тип фундаментальных взаимодействий, проявляющийся на макроскопическом уровне (возможности существования которого априорно, очевидно, отрицать бессмысленно), то для столь далеко идущих выводов необходимы очень серьезные теоретические и экспериментальные обоснования, сделанные на языке и методами современного естествознания, которые до настоящего времени представлены не были.
Законы Ньютона и основная задача механики. Для решения основной задачи механики (определение положения тела в произвольный момент времени по известным начальному положению и скорости) достаточно найти ускорение тела как функцию времени a (t). Эту задачу решают законы Ньютона (1) при условии известных сил. В общем случае силы могут зависеть от времени, положения и скорости тела:
(2) F=F (r,v, t) ,
т.е. для нахождения ускорения тела необходимо знать его положение и скорость. Описанная ситуация в математике носит название дифференциального уравнения второго порядка :
(3)
 ,
,
(4)

В математике показывается, что задача (3-4) при наличии двух начальных условий (положение и скорость в начальный момент времени) всегда имеет решение и притом единственное . Т.о. основная задача механики в принципе всегда имеет решение, однако найти его часто бывает весьма трудно.
Детерминизм Лапласа . Немецкий математик Лаплас применил аналогичную теорему о существовании и единственности решения задачи типа (3-4) для системы из конечного числа уравнений для описания движения всех взаимодействующих друг с другом частиц реального мира и пришел к выводу о принципиальной возможности расчета положения всех тел в любой момент времени. Очевидно, что это означало возможность однозначного предсказанная будущего (хотя бы в принципе) и полную детерменированность (предопределенность) нашего мира. Сделанное утверждение, носящее скорее философский, а не естественно научный характер, получило название детерминизма Лапласа . При желании из него можно было сделать весьма далеко идущие философские и социальные выводы о невозможности влиять на предопределенный ход событий. Ошибочность этого учения состояла в том, что атомы или элементарные частицы (“материальные точки”, из которых составлены реальные тела) на самом деле не подчиняются классическому закону движения (3), верному лишь для макроскопических объектов (т.е. обладающих достаточно большими массами и размерами). Правильное с точки зрения сегодняшней физики описание движения во времени микроскопических объектов, какими являются составляющие макроскопические тела атомы и молекулы, дается уравнениями квантовой механики, , позволяющими определить только вероятность нахождения частицы в заданной точке, но принципиально не дающего возможности расчета траекторий движения для последующих моментов времени.